



Tokyo Tech News
![]()
![]()
Tokyo Tech News
![]()
Members of the Aqua Lab from the Society for the Study of Robotics — an official Tokyo Tech student club — have finished third at the 8th Underwater Robotics Festival held in Iwakuni City, Yamaguchi Prefecture on August 27 and 28, 2022. Team Tokyo Tech competed in the Autonomous Underwater Vehicle (AUV) Division of the competition with their robot Kurione2.
Aqua Lab's robot Kurione2
The Underwater Robot Festival consists of two divisions. The AUV Division mainly includes student and lab teams from universities and technical colleges, while the Junior Division involves students from middle schools, high schools, and technical colleges. This year's festival was held for the first time at the Iwakuni Maritime Environment Test and Evaluation Satellite (IMETS), which has one of the largest experimental pools in Japan.
In the AUV Division, teams earn points by completing various tasks such as completing a slalom course using manual control, passing through gates using automatic navigation, and QR code detection. The winner is the team with the most points after all tasks have been attempted. In addition to the points system, the overall standings are determined by evaluating an introductory video that explains the robot's innovative functions.

IMETS facility
Aqua Lab's specialty within the Society for the Study of Robotics is aquatic and underwater robots. The major difference between land and underwater robots is the variety of directions in which the robot can move. Like airplanes, underwater robots move in a three-dimensional space. Operators must therefore consider not only motion on a horizontal plane, but also vertical motion for diving and surfacing, making stable positioning and posture of the robot more complex. To control this positioning and posture, a typical underwater robot is equipped with four to eight thrusters.
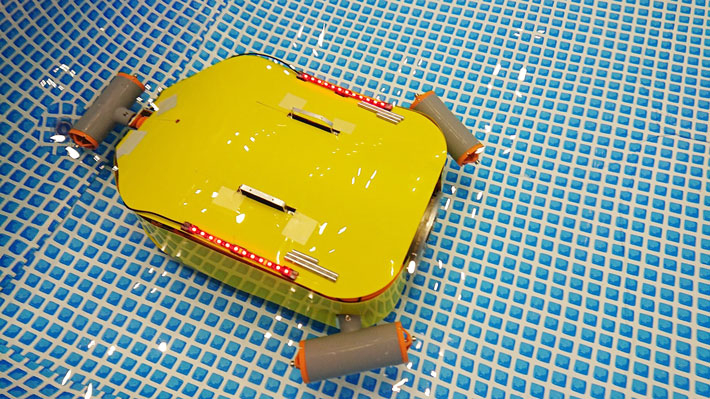
Kurione2 was designed and built with this three-dimensional motion in mind. The robot's main features include so-called azimuth thrusters on three sides, which can change the direction of thrust. When all three thrusters are pointed horizontally, the robot is in "omni-mode," allowing it to move freely in a planar direction much like a three-wheeled robot on land. When the thrusters are in a vertical position, the robot transforms into "drone mode," allow it to dive and surface vertically. The main concept behind Kurione2 is to realize the desired movement by switching between these two modes depending on the situation.

In omni-mode, Kurione2's thrusters generate thrust horizontally
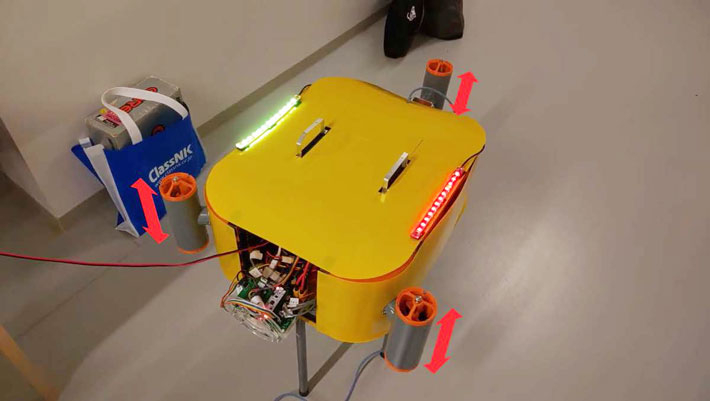
In drone mode, vertical thrust allows Kurione2 to dive and surface
Kurione2 also utilizes innovative waterproofing technology. Water can quickly destroy the battery and electronic circuits needed to control the robot, so a waterproof container is required to protect these components. The pool at IMETS is 11 meters deep, so a sturdy container that could withstand the water pressure near the bottom of the pool was required. Aqua Lab manufactured this container using aluminum brazing technology. Brazing is a processing method for joining metals by melting the solder material with intense heat. Until recently, Aqua Lab mainly used adhesives to create their waterproof containers, but brazing provided more resistance to the increased water pressure at the 11-m pool.

Brazing at Tokyo Tech's Collaboration Center for Design and Manufacturing

Finished waterproof container
As its name suggests, the AUV Division includes robots that must also complete a task independently. To complete this task, Kurione2 is equipped with an inertial measurement sensor, a water pressure sensor created by students, and a front camera. Although the Aqua Lab team was not able to accomplish this task as planned due to issues on the day of the competition, the Tokyo Tech team were able to finish third overall by scoring points consistently in the manual control portion.
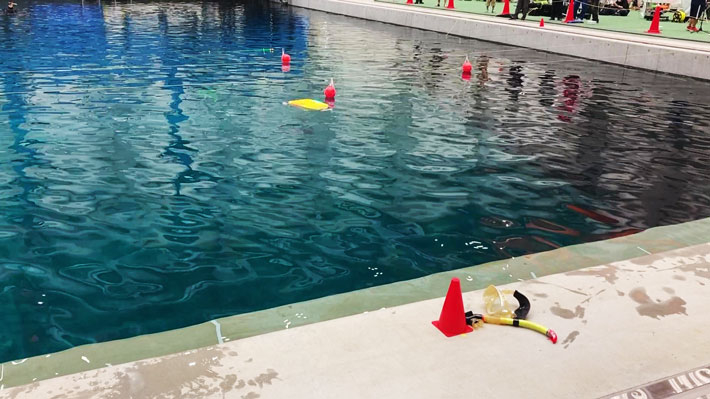
Kurione2 in action
Shohei Kamiguchi
2nd year, Information and Communications Engineering
Unlike in previous years, this year's contest included a water pressure resistance test, which we cleared without any major incidents. I was involved with creating the robot's control system. We had some unexpected problems and made some mistakes, so we were not able to run the robot very smoothly. I have been studying basic control theory through lectures at Tokyo Tech, so I want to make the most of this experience and make the robot run smoothly in the next contest.

Society for the Study of Robotics is supported by Tokyo Tech Fund

![]()
© Tokyo Institute of Technology. All rights reserved.
![]()